
 更新时间:2024-01-09 06:16:50 来源:
更新时间:2024-01-09 06:16:50 来源:本届亚运会上,中国机器人“遍地开花”,大范围的应用于所有的领域。这其中,清洁行业的机器人应用是一个不容忽视的领域。随着时下人们对于工作环境的要求慢慢的升高,清洁行业的市场需求也慢慢变得大。特别是工业清洁作为其中的重要一环,却饱受传统清洁环境恶劣、工作效率低、人力成本高等问题困扰。与人力清洁相比,采用机器人不但可以完成恶劣、极端环境下的工作,保护人员的健康安全;还能提高效率,避免将人力资源陷入重复、单调的清洁流程中。
可以看出,智能机器人的出现给清洁行业带来了更高效、更节能的清洁方式。我们专注扫地、洗地等清洁机器人的关键元器件研发制造、整机研发制造、市场服务等业务的智能化、平台化科技型企业,致力于为市场提供全方位清洁机器人解决方案及服务。
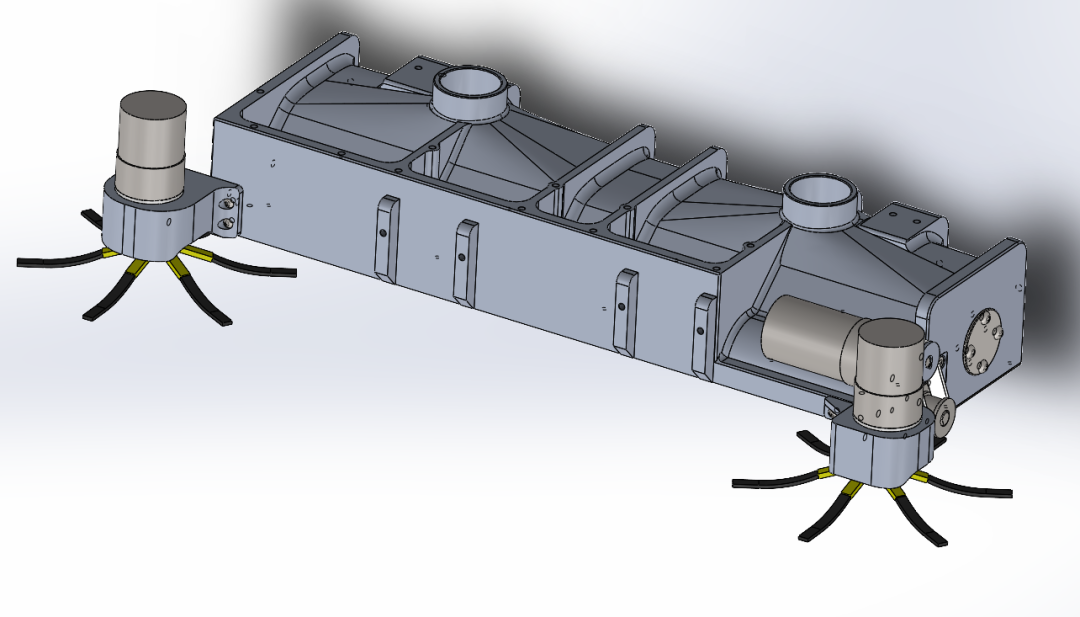
考虑到AI智能巡检清洁机器人所面临的工业环境更为复杂,我们研发部门在现有机器人基础上进行了一系列功能加强。以底端清扫装置为例,我们设计采用2个扫刷和2个滚刷组成,用于清洁颗粒比较大的杂物,左右两侧有尘盒,用于储放大颗粒杂物(如烟头、纸屑、石子等,由于吸尘器功率较小,不能将其吸入上方的尘桶中)。该机构可以上下升降3cm,用于越过轿厢台阶,并能和后置尘推装置左右联动。
然而问题也随之出现,功能创新的过程中我们颠覆了很多以往的传统零部件结构,但这个重新设计的过程容错率非常低,差之毫厘都会对设备正常运行精度产生决定性影响。由于目前的电脑性能平平,在数学模型计算场景和功能验证过程中不仅耗费时间还也许会出现数值偏差,兼容性也不够好,长时间高强度的计算有可能会出现系统稳定性问题,严重影响了我们的研发效率。
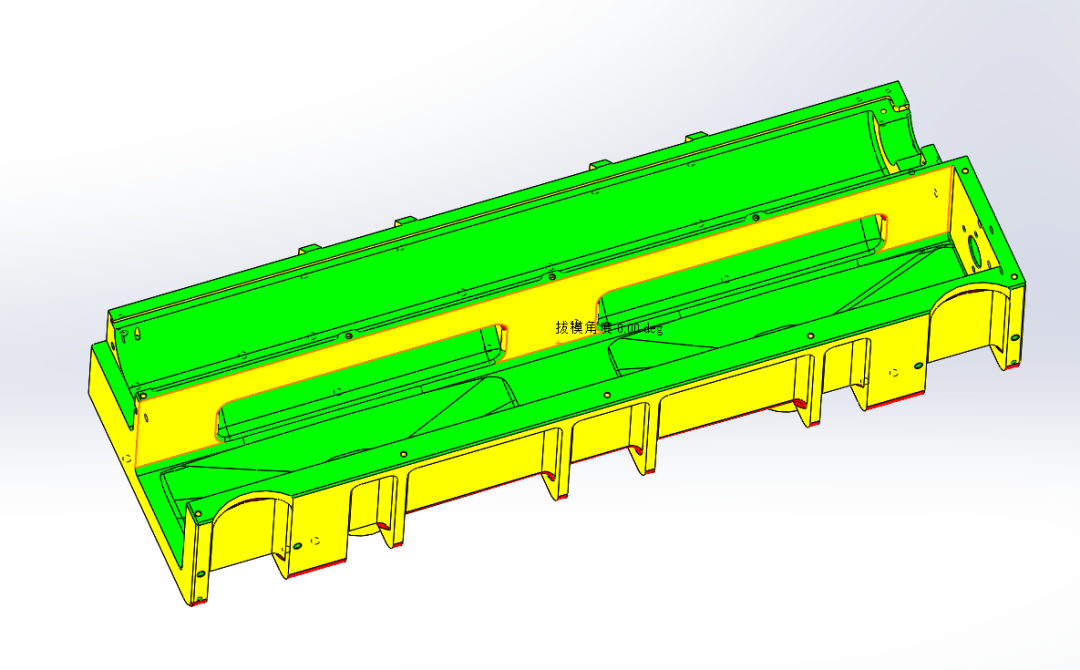
通过采用惠普Z4 G5台式工作站,使我们研发创造新兴事物的能力获得了“质的飞跃”。凭借惠普Z4 G5台式工作站搭载的NVIDIA RTX A5000专业显卡,在面对复杂3D模型、高精度计算等情形,能够迅速完成实时图形生成以及高速计算,加快我们从设计到虚拟验证的工作流程。例如当咱们进行吸尘风道流场分析、验证机器人的风道结构时,通过惠普Z4 G5台式工作站使我们的仿真等待时间相较于常规设计电脑缩短了约30%。此外,为了顺利验证零件的可制造性,我们一般会进行拔模,对模型、部件、模具或冲模的竖直面添加斜度,以便借助拔模面将部件或模型与其模具或冲模分开,我们在惠普Z4 G5台式工作站上应用仿真软件进行了压铸件的拔模分析,相较于之前整体效率提升了40%以上。
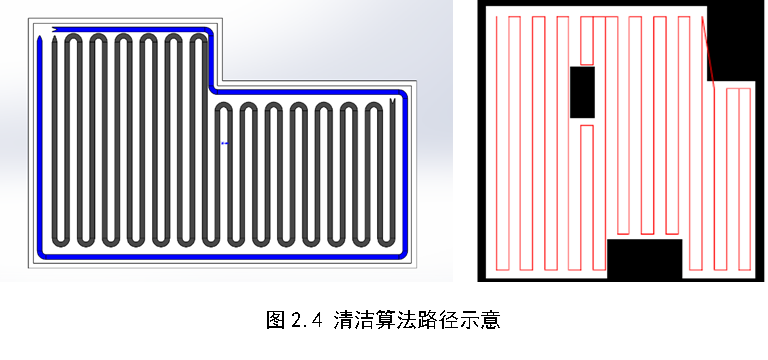
值得一提的是,为了让清洁机器人能自动识别前行路径并自动进行避让,需要结合机器人高级清洁算法来仿真机器人的运动轨迹,如避障、进出电梯运动,多机器人任务调度等。凭借惠普Z4 G5台式工作站配备的英特尔至强W5-2455X高性能处理器,我们轻轻松松完成了清洁路径计算,对不规则的区域(包括内部有不可行区域)进行路径覆盖,当内部清扫结束之后,机器人进行延边清扫。机器人前方和左右两侧的超声波传感器用于延边清扫时避让环境中的玻璃墙。
今年年初,工信部等17部门联合印发《“机器人+”应用行动实施方案》提出,到2025年,制造业机器人密度较2020年实现翻番,服务机器人、特种机器人行业应用深度和广度显著提升。
对于我们研发部门而言,不单单是本次AI智能巡检清洁机器人设计,我们将携手惠普,将工作站用于设计、研发等所有的环节,从新增产品定义、关键零部件研发、市场服务、产业协同多个角度服务客户。相信未来随着时下人们对清洁行业的需求会慢慢的高,清洁行业也需要紧密跟随科技发展的步伐,不停地改进革新和改进,实现向高效、安全、环保的清洁方式转型。在惠普的助力下,我们将逐步提升自身清洁机器人的产品创造新兴事物的能力,共同为中国机器人产业高质量发展按下“加速键”。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。举报投诉

可适应不同患者的手指尺寸,外骨骼手的长度可调节,长时间佩戴不会使患者产生疲劳感。手部康复外骨骼
,具有拖动示教、安全防碰撞等功能,可以直接与人协同工作。 采用自主设计的RJS系列关节模组,既轻便灵活、运行平滑柔顺,同时满足
,具有拖动示教、安全防碰撞等功能,可以直接与人协同工作。 采用自主设计的RJS系列关节模组,既轻便灵活、运行平滑柔顺,同时满足负荷的需求
任务,工作半径可达1333mm,适用于大范围、大负载的作业任务,可应用于工厂自动
RJU系列关节模组——面向商业、生活服务类应用一款全新的,有别于RJS系列,RJS-II系列,SHD系列,等传统外形的
任务,工作半径可达1333mm,适用于大范围、大负载的作业任务,可应用于工厂自动
任务,工作半径可达1333mm,适用于大范围、大负载的作业任务,可应用于工厂自动
有效负载为5KG,自重仅为23KG,重复定位精度可达±0.05mm,适应多样性、柔性生产